
儊儌儕僗僥傿僢僋偺椺
|
|
|
丂丂丂AIBO傪婲摦偡傞偲偒偼丄AIBO傪彴偺忋偵抲偄偰偔偩偝偄丅
丂丂丂僥乕僽儖側偳偺忋偱婲摦偡傞偲丄AIBO偑摦偄偨偲偒偵棊壓偡傞嫲傟偑偁傝傑偡丅
丂丂丂傑偨丄彴偵抲偔偲偒偼丄懠偺恖偑AIBO傪廟偭偨傝丄堉巕偱鐎偄偨傝偟側偄傛偆拲堄偟偰偔偩偝偄丅
丂(3) AIBO偺揹尮儃僞儞乮庱偮偗崻乮攚拞懁乯偵偁傝傑偡乯傪墴偟偰揹尮傪擖傟偰偔偩偝偄丅
丂丂丂揹尮僆儞屻丄30昩傎偳宱夁偡傞偲丄AIBO偑乽僈僆乕乿偲欋偊偰丄攚拞儔儞僾偑僆儗儞僕怓偵揰柵偟巒傔傑偡丅
丂丂丂AIBO偺攚拞儔儞僾偑僆儗儞僕怓偵3夞傎偳揰柵偟偨傜丄cygwin偺侾偮傔偺夋柺偱師偺傛偆偵擖椡偟偰AIBO偵愙懕偟偰偔偩偝偄丅
丂丂丂AIBO偺IP傾僪儗僗偼丄W2-101幚廗幒偱偼丄師偺俉屄偺拞偺偄偢傟偐侾偮偵側傝傑偡丅
丂丂丂嵟屻偺59000偲偄偆悢帤偼億乕僩斣崋偱屌掕偱偡丅
丂側偍丄偙偺(1)偺AIBO偵Telnet愙懕偡傞嶌嬈偼昁恵偱偼偁傝傑偣傫丅側偔偰傕Tekkotsu偼摦偒傑偡丅
BATTERY REPORT: Power Remain: 68%丂丂仼僶僢僥儕巆検 Capacity: 2100 Voltage: 7.695 Current: -536 Temperature: 29.66 Flags: BatteryConnect Discharging PowerGood 搑拞丄徣棯 丂丂丂Root Control: **0> Mode Switch 1> Background Behaviors 2> TekkotsuMon 3> Status Reports 4> File Access 5> Vision Pipeline 6> Shutdown? 7. Help SoundManager::LoadBuffer() of 45954 bytes START UP BEHAVIOR-DONE Removing expired 3 (autoprune)丂丂丂丂丂丂
丂丂丂Telnet偲偼暿偺Cygwin夋柺傪奐偄偰師偺傛偆偵懪偪崬傫偱偔偩偝偄丅
丂丂丂AIBO偺IP傾僪儗僗偼(1)偱愢柧偟偨捠傝偱偡丅
丂丂丂傑偨丄崱夞偼億乕僩斣崋偼晄梫偱偡丅
丂丂丂忋婰偺傛偆偵懪偪崬傓偲丄僐儞僩儘乕儔夋柺偑奐偒傑偡丅

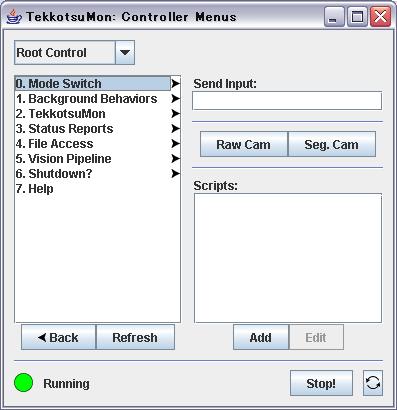
丂丂丂儊僯儏乕偐傜丄3. Status Reports丂傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂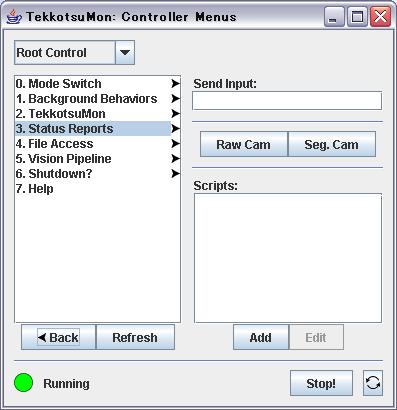
丂丂丂僐儞僩儘乕儔夋柺偑壓恾偺傛偆偵側傝傑偡偐傜丄1. Battery Check 傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂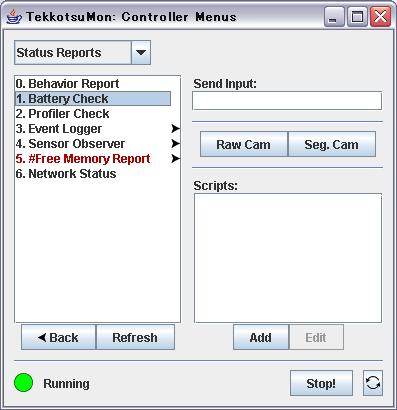
丂丂丂偡傞偲丄僶僢僥儕乕巆検偑壓恾偺傛偆偵昞帵偝傟傑偡丅
丂丂丂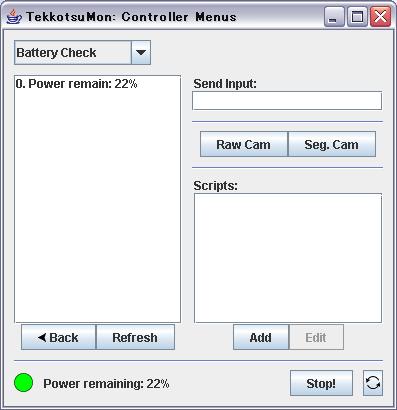
丂丂丂儊僯儏乕偵栠傞偵偼丄Back儃僞儞傪侾夞僋儕僢僋偟偰偔偩偝偄丅
丂丂丂仭丂AIBO傪棫偨偣傞偵偼
丂丂丂僩僢僾儊僯儏乕偵栠偭偨傜丄4. File Access傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂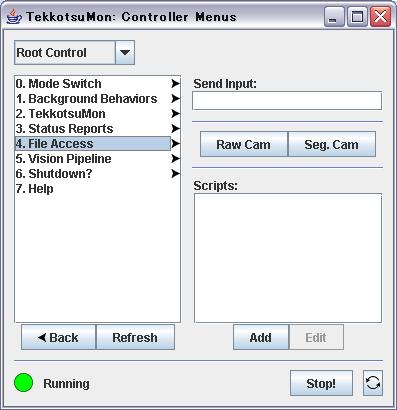
丂丂丂壓恾偺傛偆偵側傝傑偡偐傜丄3. Run Motion Sequence傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂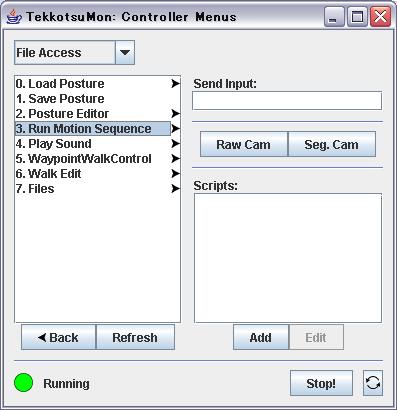
丂丂丂偡傞偲丄僐儞僩儘乕儔夋柺偑壓恾偺傛偆偵曄壔偟傑偡丅
丂丂丂斣崋偲柤慜偑幚嵺偲偼僘儗偰偄傞偐傕偟傟傑偣傫偑丄婥偵偟側偄偱偔偩偝偄丅
丂丂丂偙偺儕僗僩偼丄儊儌儕乕僗僥傿僢僋偵曐懚偝傟偰偄傞儌乕僔儑儞丒僼傽僀儖偱偡丅
丂丂丂儌乕僔儑儞丒僼傽僀儖偲偼丄AIBO偵摿掕偺摦偒乮儌乕僔儑儞乯傪偝偣傞偨傔偺娭愡妏搙偑婰榐偝傟偨僼傽僀儖偱偡丅
丂丂丂偙偙偱丄SITSTAND.MOT傪僟僽儖僋儕僢僋偡傞偲丄AIBO偑棫偪忋偑傝傑偡丅
丂丂丂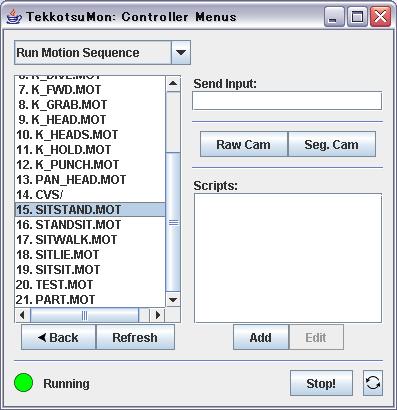
丂丂丂SITSTAND.MOT丂偼丄嵗傝乮SIT乯偐傜棫偪乮STAND乯偵巔惃傪曄壔偝偣傞儌乕僔儑儞偱偡丅
丂丂丂幚峴偟偨偄儌乕僔儑儞傪僟僽儖僋儕僢僋偡傞偲丄AIBO偱幚峴偝傟傑偡丅
丂丂丂偨偩偟丄媫側巔惃偺曄壔偼AIBO傪懝彎偡傞婋尟偑偁傞偺偱拲堄偟偰偔偩偝偄丅
丂丂丂椺偊偽丄嵗偭偰偄傞AIBO偵懳偟偰丄媫偵棫偪巔惃偺儌乕僔儑儞傪幚峴偡傞偲AIBO偑揮搢偡傞偙偲偑偁傝傑偡丅
丂丂丂仭丂AIBO偺摢傪摦偐偡偵偼
丂丂丂傕偟AIBO偑棫偭偰側偐偭偨傜丄SITSTAND.MOT傪巊偭偰AIBO傪棫偭偨忬懺偵偟偰偔偩偝偄丅
丂丂丂棟桼偼丄暁偣偨巔惃偱摢傪摦偐偡偲懝彎偡傞婋尟偑偁傞偐傜偱偡丅
丂丂丂AIBO傪棫偨偣偨屻丄僩僢僾儊僯儏乕偐傜丄2. TekkotsuMon丂傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂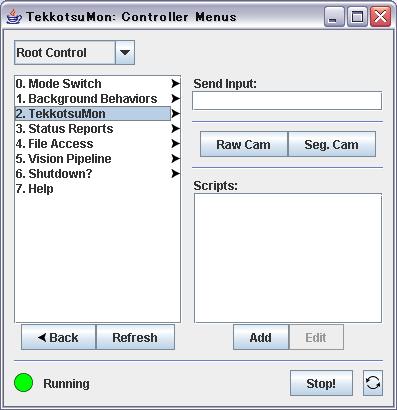
丂丂丂師偵丄壓恾偺儊僯儏乕偐傜0. Head Remote Control丂傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂
丂丂丂偡傞偲丄師偺夋柺偑昞帵偝傟傑偡丅偟偽傜偔偟偰恀傫拞偺揰偑愒偔側偭偨傜AIBO傪僐儞僩儘乕儖偱偒傞忬懺偱偡丅
丂丂丂儅僂僗偱愒偄揰傪憖嶌偡傞偲丄AIBO偺摢偑摦偒傑偡丅
丂丂丂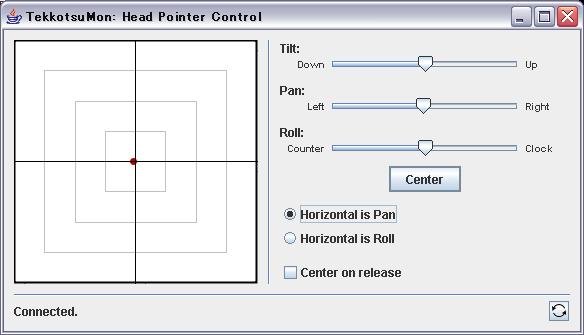
丂丂丂摢晹僐儞僩儘乕儖夋柺傪暵偠偨偄偲偒偼丄塃忋偺亊報傪僋儕僢僋偟偰偔偩偝偄丅
丂丂丂傑偨丄0. Head Remote Control偺暥帤偑愒怓偺応崌偼丄僋儕僢僋偟偰崟偵栠偟偰偔偩偝偄丅
丂丂丂
丂丂丂亂拲堄亃丂愒偺僾儘僌儔儉偑摦嶌拞丅
丂丂丂丂丂丂丂丂丂丂丂堦搙偵俀偮埲忋丄愒偵偟側偄偙偲両
丂丂丂丂丂丂丂丂丂丂丂偨偩偟丄儊僯儏乕係偲侾侾傪彍偔丅
丂丂丂
丂丂丂仭丂AIBO傪曕偐偣傞偵偼
丂丂丂傕偟AIBO偑棫偭偰側偐偭偨傜丄SITSTAND.MOT傪巊偭偰AIBO傪棫偭偨忬懺偵偟偰偔偩偝偄丅
丂丂丂棟桼偼丄暁偣偨巔惃偱懌傪摦偐偡偲懝彎偡傞婋尟偑偁傞偐傜偱偡丅
丂丂丂AIBO傪棫偨偣偨屻丄僩僢僾儊僯儏乕偐傜丄2. TekkotsuMon丂傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂
丂丂丂師偵丄壓恾偺儊僯儏乕偐傜1. Walk Remote Control丂傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂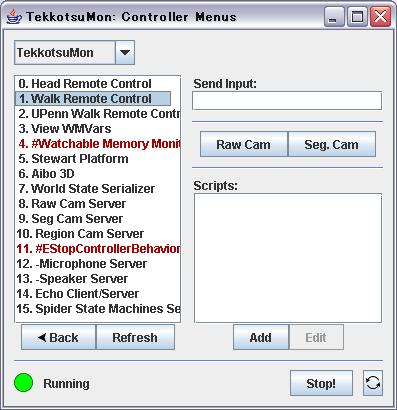
丂丂丂偡傞偲丄摢傪憖嶌偟偨偲偒偲帡偨夋柺偑昞帵偝傟傑偡丅偟偽傜偔偟偰恀傫拞偺揰偑愒偔側偭偨傜AIBO傪僐儞僩儘乕儖偱偒傞忬懺偱偡丅
丂丂丂儅僂僗偱愒偄揰傪憖嶌偡傞偲丄AIBO傪曕偐偣傞偙偲偑偱偒傑偡丅
丂丂丂丂丒忋丂丒丒丒丂慜恑
丂丂丂丂丒壓丂丒丒丒丂屻戅
丂丂丂丂丒嵍丂丒丒丒丂嵍慁夞
丂丂丂丂丒塃丂丒丒丒丂塃慁夞
丂丂丂曕峴僐儞僩儘乕儖夋柺傪暵偠偨偄偲偒偼丄塃忋偺亊報傪僋儕僢僋偟偰偔偩偝偄丅
丂丂丂傑偨丄1. Walk Remote Control偺暥帤偑愒怓偺応崌偼丄僋儕僢僋偟偰崟偵栠偟偰偔偩偝偄丅
丂丂丂
丂丂丂亂拲堄亃丂愒偺僾儘僌儔儉偑摦嶌拞丅
丂丂丂丂丂丂丂丂丂丂丂堦搙偵俀偮埲忋丄愒偵偟側偄偙偲両
丂丂丂丂丂丂丂丂丂丂丂偨偩偟丄儊僯儏乕係偲侾侾傪彍偔丅
丂丂丂
丂丂丂1. Walk Remote Control偼丄CMU乮僇乕僱僊乕儊儘儞戝妛乯偑奐敪偟偨曕峴僾儘僌儔儉偱偡丅
丂丂丂Tekkotsu偵偼丄傕偆侾偮曕峴僾儘僌儔儉偑擖偭偰偄傑偡丅偦傟偼丄儁儞僔儖僶僯傾戝妛偑奐敪偟偨僾儘僌儔儉偱偡丅
丂丂丂儁儞僔儖僶僯傾戝妛偺曕峴僾儘僌儔儉傪摦偐偡偨傔偵偼丄2. UPennWalk Remoto Control丂傪僟僽儖僋儕僢僋偟偰偔偩偝偄丅
丂丂丂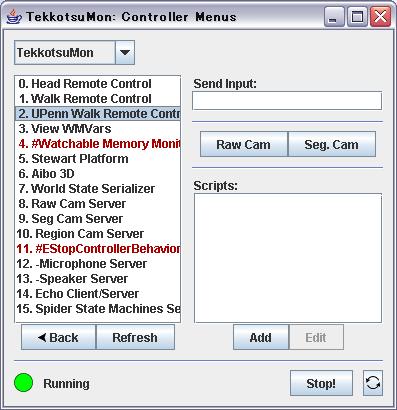
丂丂丂憖嶌夋柺偼丄偝偒傎偳偺1. Walk Remote Control丂偲摨偠偱偡丅
丂丂丂偟偐偟丄曕偒曽偑堘偄傑偡偹丅偙偺傛偆偵戝妛偵傛偭偰堎側傞曕偒曽偱偡偑丄偳偪傜傕儘儃僇僢僾偱桪廏側惉愌傪庢偭偨僾儘僌儔儉偱偡丅
丂丂丂曕峴僐儞僩儘乕儖夋柺傪暵偠偨偄偲偒偼丄塃忋偺亊報傪僋儕僢僋偟偰偔偩偝偄丅
丂丂丂傑偨丄2. UPennWalk Remote Control偺暥帤偑愒怓偺応崌偼丄僋儕僢僋偟偰崟偵栠偟偰偔偩偝偄丅
丂丂丂仭丂AIBO偺僇儊儔夋憸傪尒傞偵偼
丂丂丂僐儞僩儘乕儖夋柺偺Raw Cam儃僞儞傪僋儕僢僋偡傞偲丄怴偟偄夋柺偑昞帵偝傟傑偡丅
丂丂丂偦偺夋柺偵偼AIBO偺僇儊儔偐傜尒偨夋憸偑塮偟弌偝傟傑偡丅
丂丂丂傑偨丄Seg. Cam儃僞儞偼丄AIBO偑幆暿偟偨怓傪昞帵偡傞夋柺偱偡丅
丂丂丂崱偺偲偙傠丄愒偲惵傪幆暿偱偒傑偡偑徠柧忦審偵傛偭偰偼丄偆傑偔幆暿偱偒傑偣傫丅
丂丂丂椺偊偽丄AIBO偵柧傞偄晹壆偱妎偊偝偣偨怓傪丄埫偄晹壆偱幆暿偝偣傞偙偲偼偱偒傑偣傫丅
丂丂丂偙偺傛偆側応崌偵偼怓傪妎偊側偍偝側偔偰偼側傝傑偣傫丅
丂丂丂僐儞僩儘乕儔夋柺傪廔椆偡傞偲偒偼丄塃忋偺亊報傪僋儕僢僋偟偰偔偩偝偄丅
丂丂丂偪側傒偵丄偙偺僐儞僩儘乕儔偼Java偱嶌傜傟偰偄傑偡丅
丂丂丂仭丂AIBO偐傜儊儌儕僗僥傿僢僋傪敳偔偲偒偼
丂丂丂AIBO偺揹尮偑愗傟偰偄傞偙偲傪妋擣偟偰偐傜儊儌儕僗僥傿僢僋傪敳偄偰偔偩偝偄丅
丂丂丂儊儌儕僗僥傿僢僋墶偺愒偄儔儞僾偑揰摂偟偰偄傞帪偼儊儌儕僗僥傿僢僋傪敳偐側偄偱偔偩偝偄丅
|
|
|